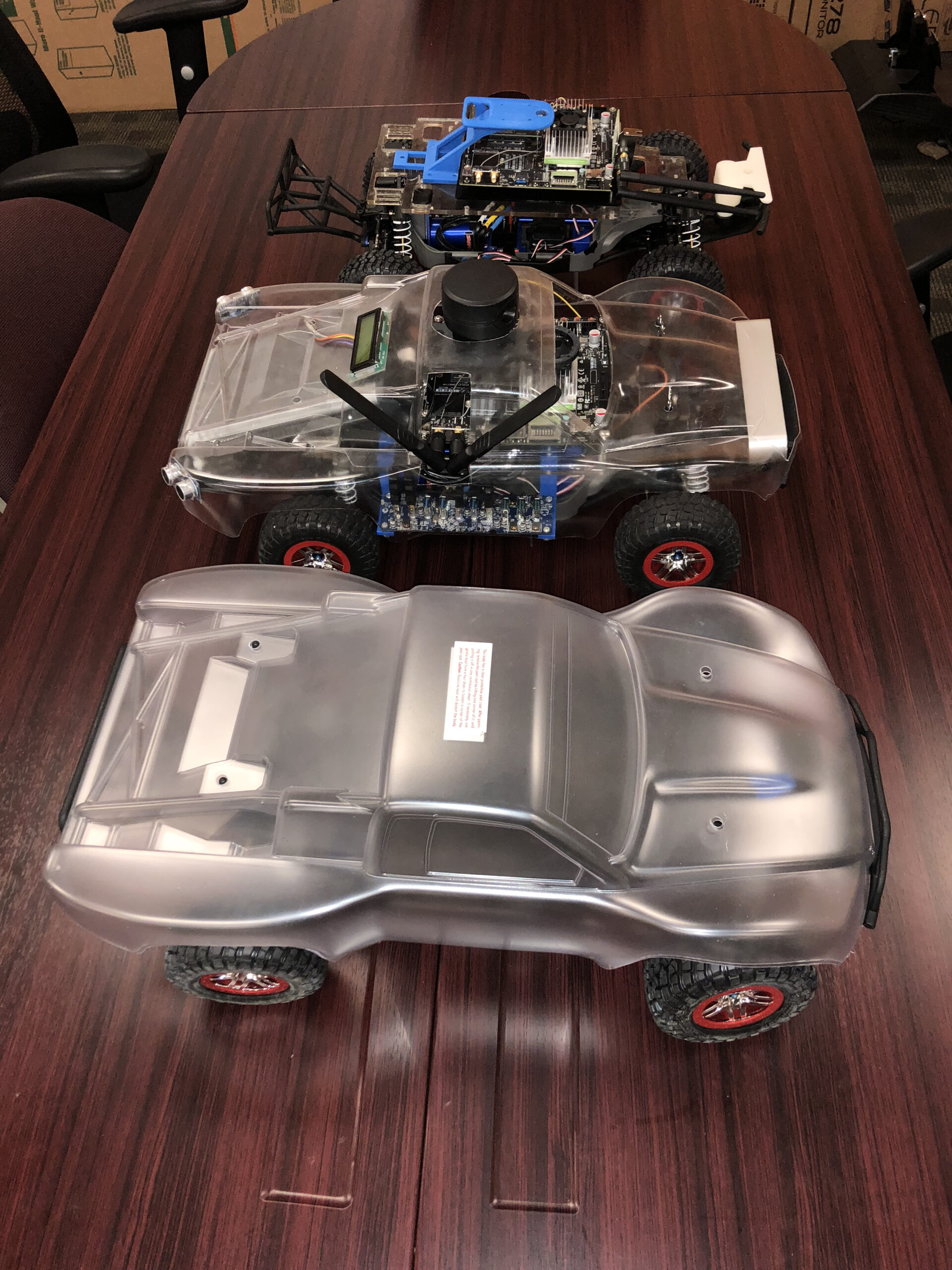
SCVP vehicles are equipped with NVIDIA Jetson TX2 AI computers, a ZED Stereo camera, 3D LiDAR, and a long-range Li-Ion battery. The vehicles are able to reach 60mph and perform driving maneuvers such as platooning and lane change at high speed.
The source-code and autonomous driving software stack of this project is publicly available on Github, please feel free to reach out if you need more information or the up-to-date repository.